Tykkään rakennella erilaisia "Rovereita". Nimi ja projektit ovat mars-roverin innoittamia. Ensiksi käytin alustana Raspberry Pi tietokonetta ja myöhemmin esp32 microcontrollereita. Tavoitteena on aina ollut että ohjaaminen onnistuisi nettiprotokollan yli. Joko liveohjauksella UDP:ta tai yksittäisillä etenemis komennoilla TCP:tä/websockettia
Ohjelmoin Roverit käyttäen Pythonia Raspberry Pi:llä ja micropythonia esp32:lla
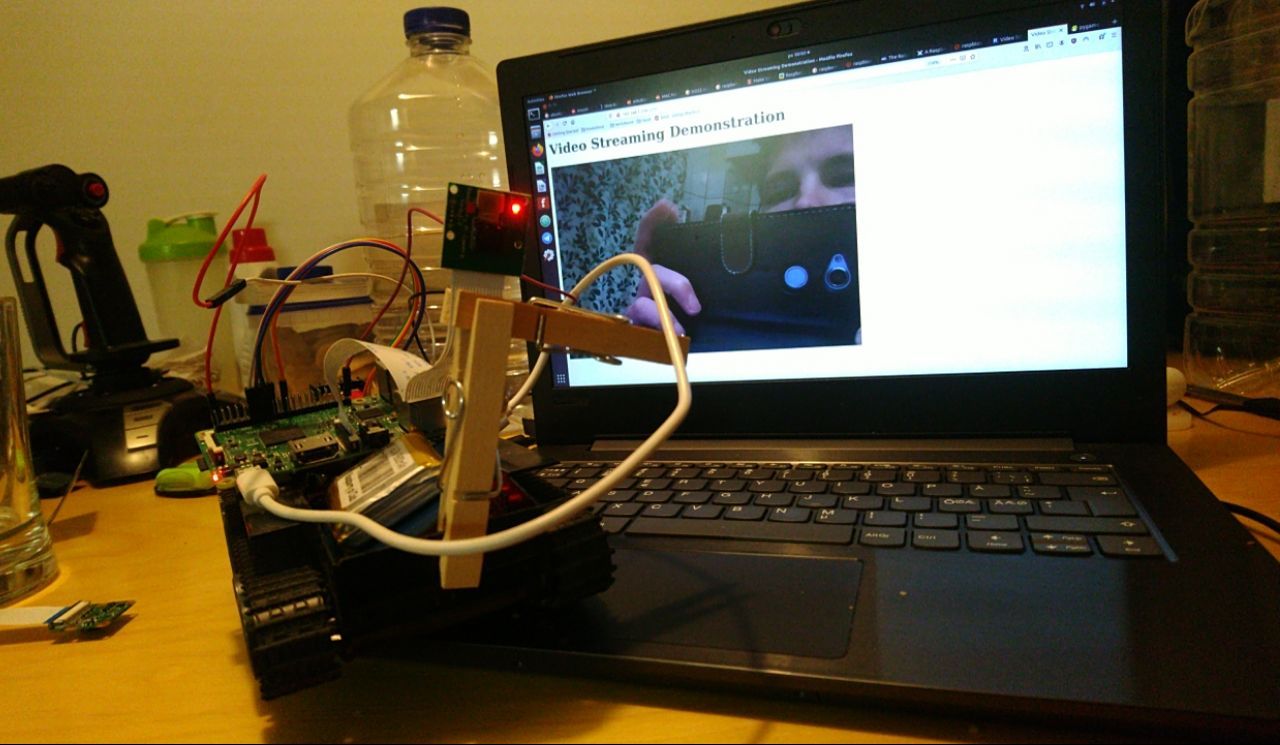
Yllä olevassa kuvassa on videostreami wifin yli. Wifin jakaa erillinen 4G mokkula
Ulkokuori on tehty pvc-foamista joka on kevyttä ja kestävää
Videolla on alkeellinen puhelin appi josta voi kahta slideria säätämällä ohjata telojen nopeutta
Roverin ohjaus internetin yli toimi hyvin ja ajoin sillä myöhemmin etänä koti-korttelin ympäri. Satunnainen viive piti ottaa ohjatessa huomioon.
Lyhyt video myös Raspberry Pi:llä ohjatusta lennokista. Lennokin ohjaus oli ohjelmoitu pythonilla UDP-protokollan yli. Omatekoinen lennokki ja ohjaus softa ei ollut hyvä yhdistelmä ja ensilento päättyi 20m liidon jälkeen asfalttiin.